الإعلانات
السيارات التي يتم التحكم فيها عن بعد ممتعة بالتأكيد القيادة الذاتية السيارات الروبوتية أكثر متعة. في هذا البرنامج التعليمي ، سنقوم ببناء روبوت بأربع عجلات يمكنه القيادة وتجنب العقبات. اشتريت هذه المجموعة الكاملة 4WD من AliExpress، ولكن يمكنك بسهولة شراء معظم هذه المكونات من متجر إلكترونيات وتجميعها بنفسك.
أوصي بقراءة جميع التعليمات قبل البدء ، لأن ذلك سيوضح بعض الأشياء التي قد تكون مربكة في المرة الأولى. أيضًا ، قد يبدو هذا المشروع طويلًا جدًا ومتقدمًا نظرًا لطول التعليمات ، ولكنه في الواقع بسيط جدًا. لا داعي للترهيب - هذا مشروع على مستوى المبتدئين يمكنك الحصول على بعض النتائج المرضية معه ، ثم البناء عليه كلما عرفت المزيد. ألا تحب هذا النمط من الروبوت؟ إليك المزيد الروبوتات اردوينو 8 روبوتات Arduino يمكنك البناء عليها بأقل من 125 دولارًايمكن لـ Arduino القيام بالكثير ، ولكن هل تعلم أنه يمكنه إنشاء روبوتات كاملة؟ لرخيصة جدا جدا! اقرأ أكثر يمكنك البناء بسهولة بدلاً من ذلك.
إليك ما لدينا ، بعد إخراج كل شيء من العبوة:

للبدء ، سنقوم بتوصيل المحركات والجسر H (البطاقة التي توفر الطاقة للمحركات) بالجزء السفلي من الهيكل. أولاً ، قم بتثبيت الأقواس المعدنية الأربعة (وهي عبارة عن كتل معدنية مستطيلة ومثقبة) لكل محرك باستخدام مسامير طويلة وصواميل.
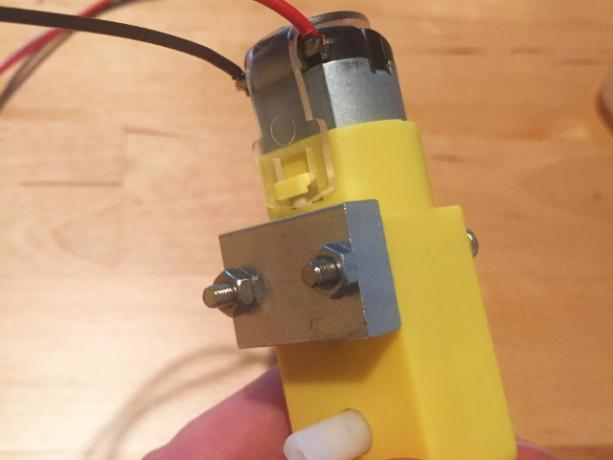
ستحتاج إلى التأكد من إرفاقها بشكل صحيح ، لذا تحقق من الصورة أدناه للتأكد من أن جانب الكتلة الذي يحتوي على فتحتين مثقبتين سيواجهان لأسفل. لاحظ أن الأسلاك الموجودة على كل محرك تشير إلى منتصف الهيكل المعدني.
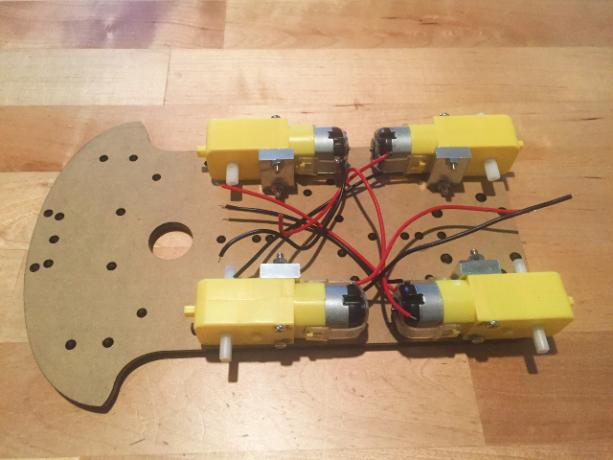
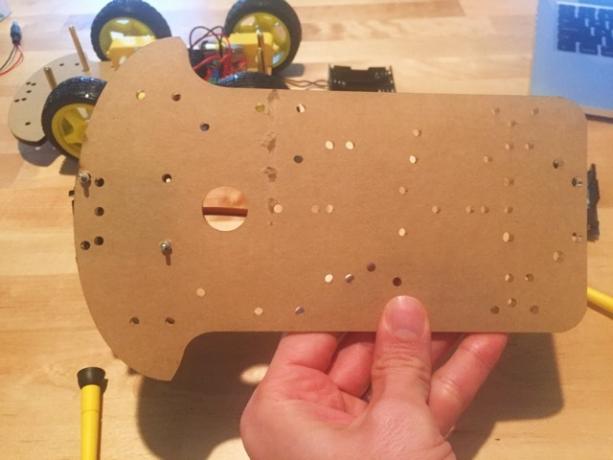
يمكن الآن توصيل كل محرك بالهيكل باستخدام مسامير قصيرة في الجزء السفلي من كل قوس معدني. فيما يلي عرض لأسفل الهيكل حتى تتمكن من معرفة مكان البراغي:
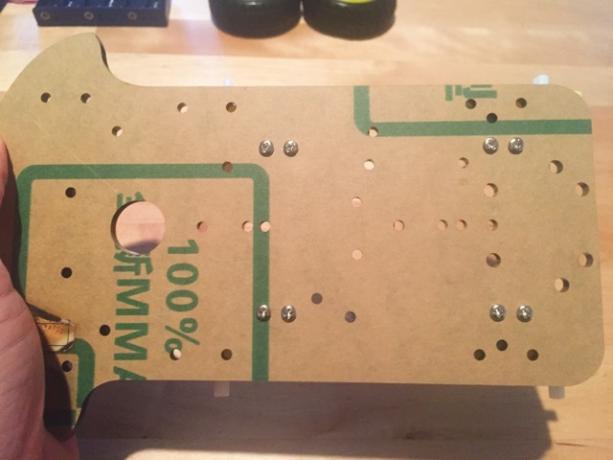
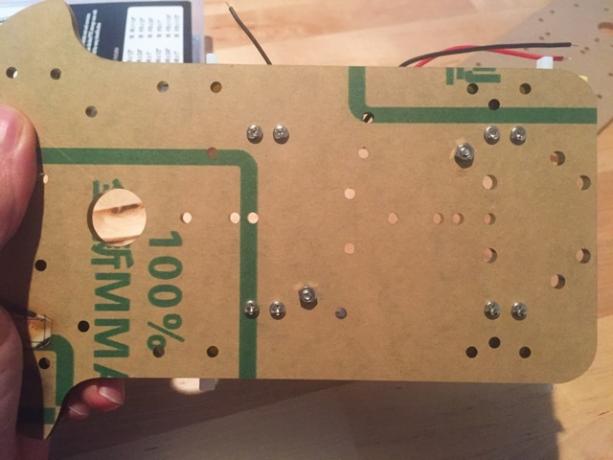
الخطوة التالية هي تأمين الجسر H (هذا هو اللوحة الحمراء ، في مجموعتي) بالهيكل. قد ترغب في الانتظار حتى يتم توصيل جميع الأسلاك بجسر H قبل القيام بذلك ، ولكن هذا الأمر متروك لك (لقد وجدت أنه أسهل). ملاحظة سريعة: كانت مجموعتي تفتقد عددًا من أدوات التثبيت ، لذلك استخدمت الشريط الكهربائي لتأمين الجسر. ومع ذلك ، يمكنك أن ترى هنا المكان الذي كانت ستذهب فيه البراغي والصواميل:
الآن بعد أن تم توصيل الجسر H ، يمكنك البدء في توصيل مصدر الطاقة. نظرًا لأن حامل البطارية بحجم AA بحجم ستة يأتي مزودًا بمحول تيار مستمر ، فسوف تحتاج إلى قطع النهاية (التي قمت بها) أو تشغيل أسلاك التوصيل إلى البطاريات نفسها.

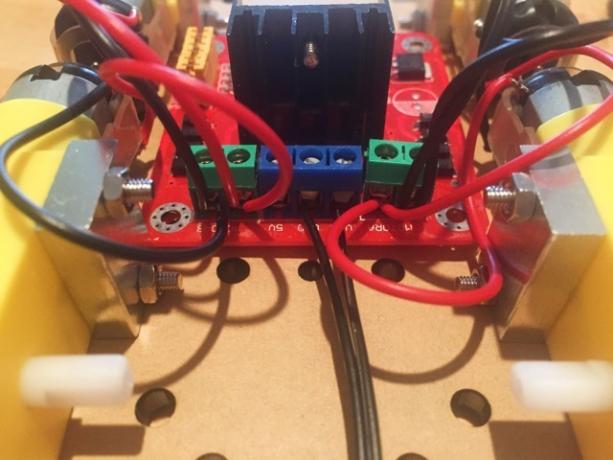
بغض النظر عن الطريقة التي تقرر بها القيام بذلك ، ستقوم بتشغيل السلك الموجب إلى المنفذ المسمى "VMS" والسلك السالب إلى المنفذ المسمى "GND" على الجسر. قم بتثبيت السحابات وتأكد من أنها آمنة. بعد ذلك ، ستقوم بتوصيل أسلاك المحرك. على كلا الجانبين ، هناك مجموعة من منفذين ، أحدهما يحمل اسم "MOTORA" والآخر "MOTORB". على حد سواء سوف تدخل الأسلاك الحمراء على كل جانب إلى الميناء الأخضر المركزي ، وستدخل كلتا السلكتين الأسود في أقصى الخارج. يجب أن توضح هذه الصورة أكثر:
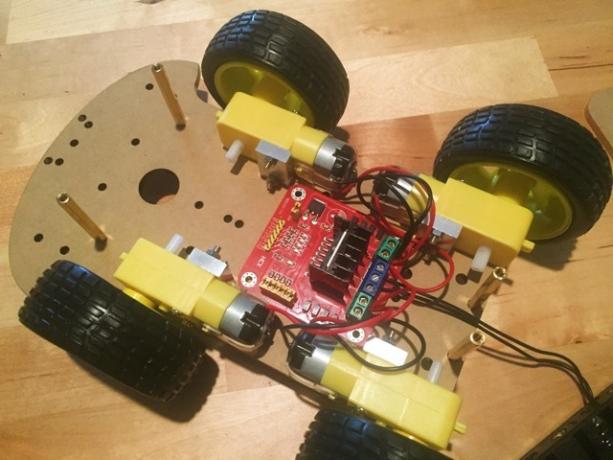
اكتشفت أنني اضطررت إلى خلع بعض الأسلاك من أسلاك المحرك لتشغيلها. الآن بعد أن أصبحت المحركات وإمدادات الطاقة كلها متصلة بالأسلاك ، قم بتحريك العجلات إلى أعمدة محرك المحرك ، و إرفاق أعمدة النحاس الأربعة في المواقع الموضحة في الصورة أدناه (يحتاج كل عمود نحاسي إلى مسمار واحد صغير). هذا الروبوت بدأ يتشكل!
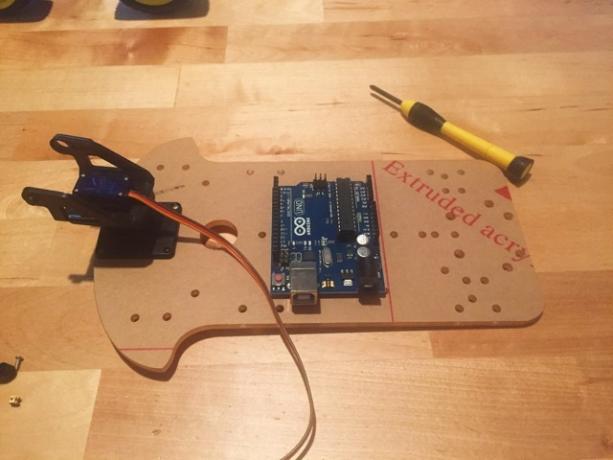
الآن ، ضع هذا الجزء من الهيكل جانبًا وامسك الجزء الآخر الذي سيجلس في الأعلى. الخطوة التالية هي إرفاق Arduino - مرة أخرى ، كان علي استخدام الشريط الكهربائي ، ولكن يجب أن تكون قادرًا على تأمين الشريط الخاص بك بشكل أفضل مع بعض البراغي والصواميل.

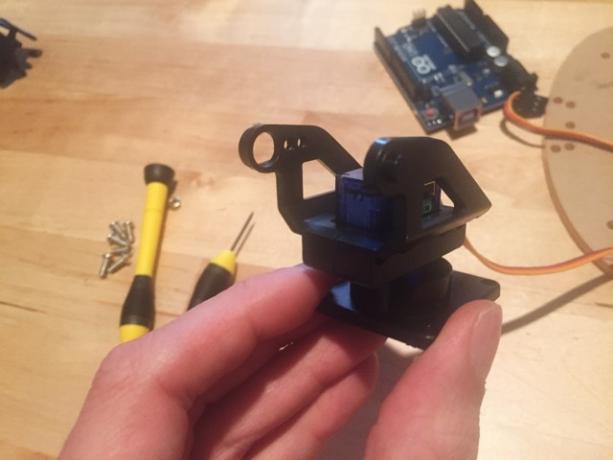
تتطلب الخطوة التالية الماكينة الدقيقة ، والمقطع العرضي الأسود ، وحامل المؤازرة (الذي يتكون من ثلاث قطع بلاستيكية سوداء) ، وبعض البراغي الصغيرة. استخدم أحد المسامير الحادة الأكبر في المجموعة لربط المقطع العرضي الأسود بالمؤازرة الدقيقة:
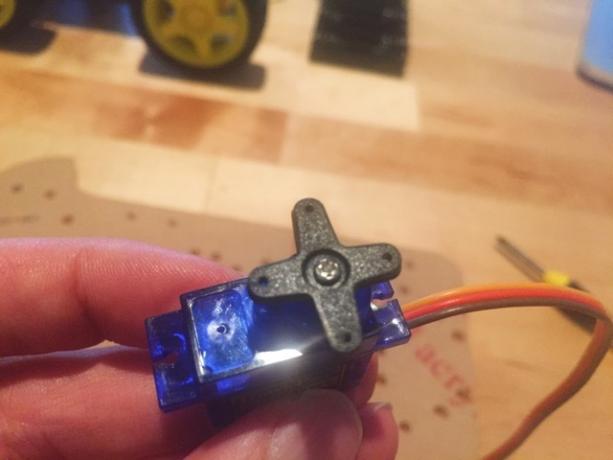
ثم اقلب المؤازرة رأسًا على عقب في الحلقة البلاستيكية السوداء للحامل. تأكد من أن الأسلاك الخارجة من المؤازرة تواجه في نفس اتجاه الجزء الأطول من الحامل (مرة أخرى ، انظر الصورة أدناه) ، واستخدام أربعة مسامير صغيرة لتأمين العارضة (هناك أربعة فتحات في الحامل تتماشى مع الثقوب الموجودة على العارضة).

إليك ما يبدو بعد إرفاقه:
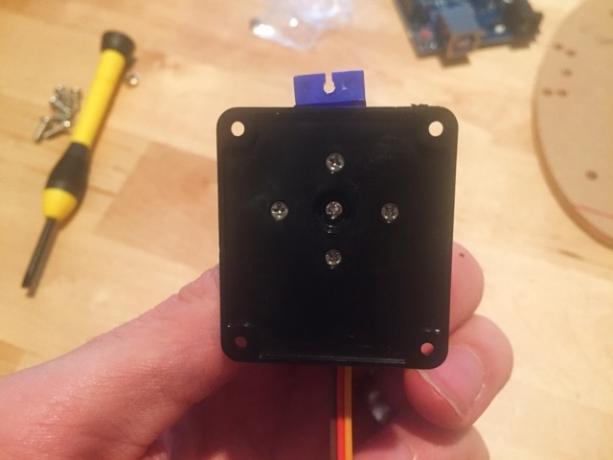
أخيرًا ، خذ القطعتين الأخريين من حامل الماكينة وضعهما على الماكينة (هناك أخاديد في القطع الجانبية تتطابق مع علامة البلاستيك على الماكينة).
الآن بعد اكتمال حامل المؤازرة ، يمكن تركيبه على الهيكل.
هنا حيث تذهب البراغي:
حان الوقت لإعطاء الروبوت بعض العيون. قم بتوصيل جهاز استشعار الموجات فوق الصوتية بحامل المؤازرة باستخدام رابطين مضغوطين.

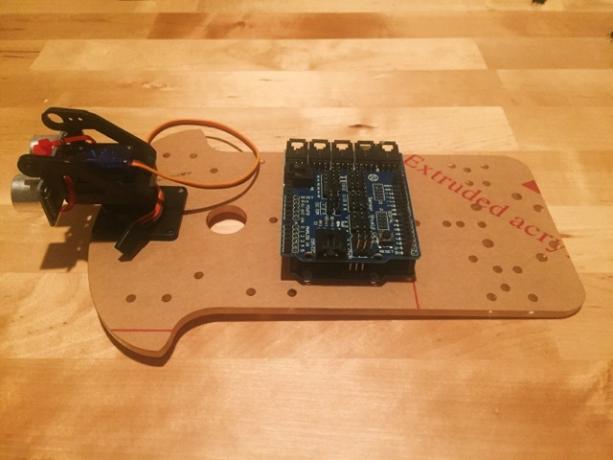
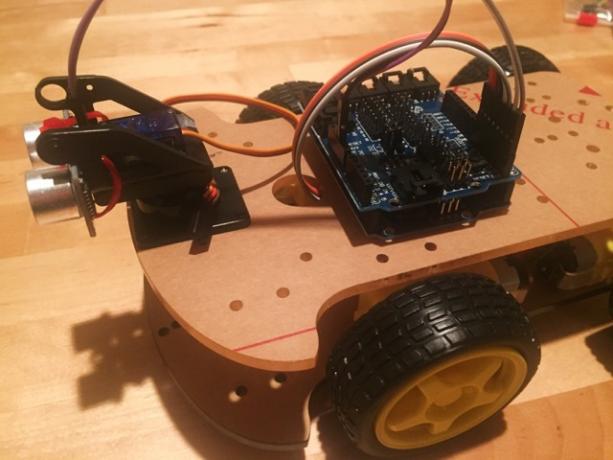
إذا كنت تعمل من نفس المجموعة التي أعمل بها ، فستحصل على درع مستشعر Arduino. لن نستخدمها في هذا الإصدار ، ولكن يمكنك وضعها على أعلى UNO الآن إذا كنت تريد (كما فعلت في الصورة أدناه). ما عليك سوى محاذاة الدبابيس الموجودة في الجزء السفلي من الدرع مع منافذ الإدخال / الإخراج في Arduino واضغط لأسفل لتوصيلها. لا تحتاجه في الوقت الحالي ، ولكن يمكن أن تكون الدروع في متناول اليدين أعلى 4 اردوينو الدروع لقوة المشاريع الخاصة بكلقد اشتريت مجموعة بداية اردوينو ، لقد اتبعت جميع الأدلة الأساسية ، ولكنك الآن وصلت إلى حجر عثرة - فأنت بحاجة إلى المزيد من البتات والبوب لتحقيق حلمك في الإلكترونيات. لحسن الحظ ، إذا كان لديك ... اقرأ أكثر .
سواء قمت بتوصيل درع المستشعر أم لا ، ستحتاج الآن إلى أربعة أسلاك لتوصيل مستشعر الموجات فوق الصوتية بـ Arduino. هناك أربعة دبابيس على المستشعر ، VCC ، GND ، TRIG ، و ECHO. قم بتوصيل VCC بدبوس 5V في Arduino و GND إلى GND و TRIG و ECHO إلى I / O دبابيس 12 و 13.
أمسك الآن بالجزء السفلي من الهيكل وقم بتوصيل ستة أسلاك توصيل بدبابيس I / O للجسر H (يتم تمييزها بـ ENA و IN1 و IN2 و IN3 و IN4 و ENB). لاحظ الأسلاك الملونة المتصلة بالمنافذ ، كما ستحتاج إلى معرفتها لاحقًا.

حان الوقت الآن لبدء تجميع هذا الشيء معًا. أمسك الجزء العلوي من الهيكل وقم بوضعه أعلى الأعمدة النحاسية المتصلة بالجزء السفلي ، واسحب الأسلاك المتصلة بالجسر H من خلال الفتحة الموجودة في منتصف الهيكل المعدني. قم بتوصيل الأسلاك الستة بمنافذ الإدخال / الإخراج كما يلي:
- ENA إلى منفذ I / O 11
- ENB إلى منفذ I / O 10
- A1 إلى منفذ I / O 5
- A2 إلى منفذ I / O 6
- B1 إلى منفذ I / O 4
- B2 إلى منفذ I / O 3
الآن ، استخدم أربعة مسامير قصيرة لإرفاق الجزء العلوي من الهيكل بأعمدة نحاسية. ضع حامل البطارية بحجم AA بحجم ستة على الجزء العلوي من الهيكل (قم بتثبيته إن أمكن) ، وأرفق حامل الخلية 9V بـ Arduino ، ويكون هذا البوت جاهزًا للهز!
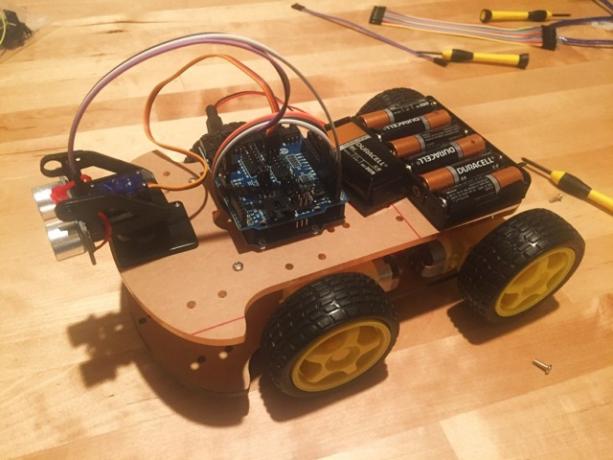
حسنا ، تقريبا على استعداد للروك. ليس لديها شخصية كافية بعد.
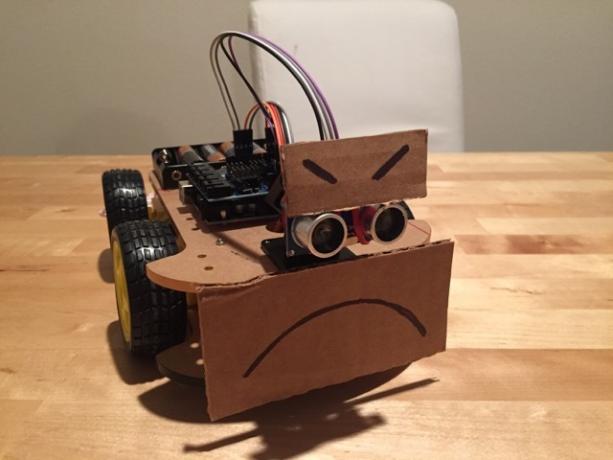
هناك نذهب. الآن لإعطائها دماغ. دعنا نقوم ببعض البرمجة.
أول شيء سنفعله هو الاختبار للتأكد من توصيل الجسر والمحركات بشكل صحيح. هنا رسم سريع سيخبر البوت أن يتقدم للأمام لمدة نصف ثانية ، ثم يرجعه للخلف لمدة نصف ثانية ، ثم يستدير لليسار واليمين:
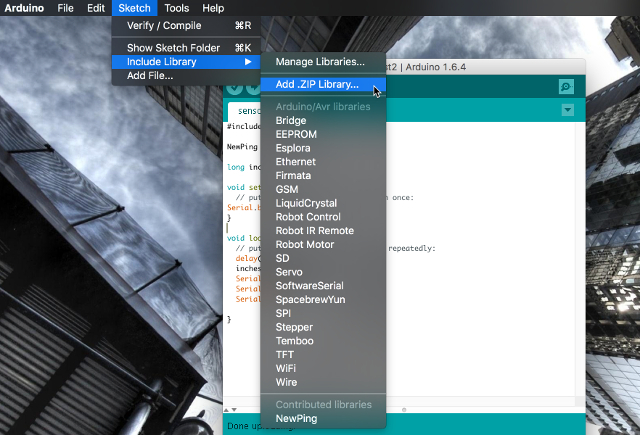
يعد هذا رمزًا كبيرًا لاختبار بسيط ، ولكن تحديد كل هذه الوظائف يجعل من السهل تعديلها لاحقًا. (شكر كبير لبيلوع على مشاركة مدونة على استخدام جسر H لتحديد هذه الوظائف.) إذا حدث خطأ ما ، تحقق من جميع اتصالاتك وأن الأسلاك متصلة بالدبابيس الصحيحة. إذا نجح كل شيء ، فقد حان الوقت للانتقال إلى اختبار المستشعر. لاستخدام مستشعر الموجات فوق الصوتية ، سترغب في ذلك قم بتنزيل مكتبة NewPing، ثم استخدم رسم> تضمين مكتبة> إضافة مكتبة ZIP ... لتحميل المكتبة.
تأكد من رؤية بيان التضمين في الجزء العلوي من الرسم التخطيطي الخاص بك ؛ إذا لم تفعل ، اضرب رسم> تضمين مكتبة> NewPing. بمجرد القيام بذلك ، قم بتحميل الرسم التالي:
قم بتحميل الرسم وفتح الشاشة التسلسلية باستخدام أدوات> مراقب تسلسلي. سترى تسلسل تحديث سريع للأرقام. أمسك يدك أمام المستشعر وانظر إذا تغير هذا الرقم. حرك يدك للخارج ، ويجب أن تحصل على قياس لمسافة يدك عن المستشعر.
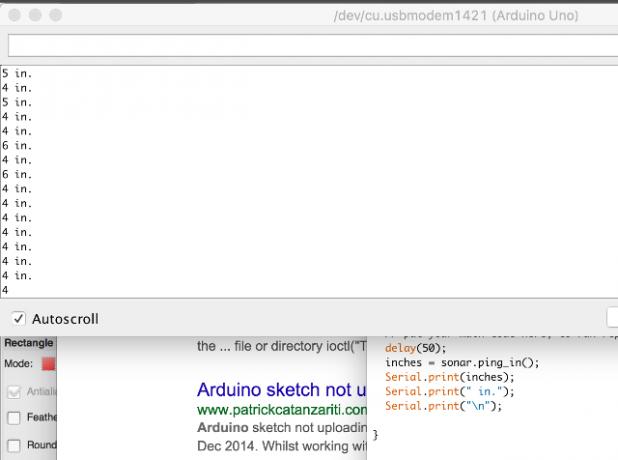
إذا كان كل شيء يعمل بشكل صحيح ، فقد حان الوقت لتجميع كل شيء وترك هذا الشيء يعمل! ها هو رمز الروبوت الآن. كما يمكنك أن تقول على الأرجح ، هذا هو في الأساس رسمتي الاختبار معًا إذا عبارة إضافية للتحكم في سلوك الروبوت. لقد أعطيناه سلوكًا بسيطًا للغاية في تجنب العوائق: إذا اكتشف شيئًا على بعد أقل من أربع بوصات ، فسيعمل على النسخ الاحتياطي ، ثم انعطف يسارًا ، وبدأ في التحرك مرة أخرى. إليك مقطع فيديو لبرنامج الروبوت قيد التشغيل.
امنح الروبوت الخاص بك بعض الحياة
بمجرد أن تعمل هذا السلوك بشكل صحيح ، يمكنك إضافة سلوك أكثر تعقيدًا ؛ اجعل الروبوت يتناوب بين الاستدارة لليسار واليمين ، أو الاختيار بشكل عشوائي ؛ صوت جرس إذا اقترب من شيء ما ؛ أدر فقط ، بدلاً من النسخ الاحتياطي ؛ أنت محدود حقًا فقط بخيالك. يمكنك استخدام أي شيء في حياتك طقم اردوينو المبدئ ماذا يوجد في Arduino Starter Kit؟ [اردوينو مبتدئين]في مواجهة صندوق مليء بالمكونات الإلكترونية ، من السهل غمره. فيما يلي دليل لما ستجده بالضبط في مجموعتك. اقرأ أكثر لإضافة المزيد من الوظائف. ستلاحظ أيضًا أننا لم نقم بتشفير أي شيء للمضاعفات حتى الآن: يمكنك في الواقع جعل "عيون" الروبوت تتحرك ذهابًا وإيابًا. ربما استخدامها للبحث عن مسار بدلاً من مجرد النسخ الاحتياطي كلما وجدت عقبة أمامك مباشرة.
أخبرنا إذا قررت بناء هذا الروبوت أو آخر ، وأخبرنا كيف تقرر تخصيص سلوكه أو مظهره. إذا كان لديك أي أسئلة حول هذا الروبوت ، فقم بنشرها في التعليقات أدناه ، وسأرى ما إذا كان يمكنني المساعدة!
دان هي إستراتيجية المحتوى واستشاري التسويق الذي يساعد الشركات على توليد الطلب والعملاء المحتملين. كما يكتب عن الاستراتيجية وتسويق المحتوى في dannalbright.com.