الإعلانات
من المحتمل ألا تكون الترجمة والتعريف المتزامنين (SLAM) عبارة تستخدمها كل يوم. ومع ذلك ، يستخدم العديد من أحدث الأعاجيب التكنولوجية الرائعة هذه العملية كل مللي ثانية من عمرهم.
ما هو سلام؟ لماذا نحتاجه؟ وما هي هذه التقنيات الرائعة التي تتحدث عنها؟
من اختصار إلى فكرة مجردة
إليك لعبة سريعة لك. أي من هؤلاء لا ينتمي؟
- سيارات ذاتية القيادة
- تطبيقات الواقع المعزز
- المركبات الجوية المستقلة وتحت الماء
- يلبس الواقع المختلط
- رومبا
قد تعتقد أن الجواب بسهولة هو العنصر الأخير في القائمة. بطريقة ما ، أنت على حق. بطريقة أخرى ، كانت هذه لعبة خدعة حيث أن جميع هذه العناصر مرتبطة.

السؤال الحقيقي للعبة (رائع جدا) هو: ما الذي يجعل كل هذه التقنيات ممكنة؟ الجواب: توطين وترجمة في وقت واحد ، أو SLAM! كما يقول الأطفال الرائعون.
بشكل عام ، فإن الغرض من خوارزميات SLAM سهل بما يكفي للتكرار. سيستخدم الروبوت التعريب المتزامن ورسم الخرائط لتقدير موقعه واتجاهه (أو وضعه) في الفضاء أثناء إنشاء خريطة لبيئته. هذا يسمح للروبوت بتحديد مكانه وكيفية التحرك من خلال مساحة غير معروفة.
لذلك ، نعم ، هذا يعني أن كل خوارزمية الهوى هذه هي تقدير الموقف. تقنية شائعة أخرى ،
نظام تحديد المواقع العالمي (أو GPS) كيف يعمل تتبع GPS وما الذي يمكنك تتبعه به؟GPS. نحن نعرفها على أنها التكنولوجيا التي توجهنا من أ إلى ب. لكن GPS أكثر من ذلك. هناك عالم من الاحتمالات ، ولا نريدك أن تفوتك. اقرأ أكثر تم تقدير الموقف منذ حرب الخليج الأولى من 1990s.التفريق بين SLAM و GPS
إذن لماذا الحاجة إلى خوارزمية جديدة؟ GPS له مشكلتان متأصلتان أولاً ، في حين أن نظام تحديد المواقع العالمي (GPS) دقيق بالنسبة إلى المقياس العالمي ، فإن الدقة والدقة على حد سواء تقلل من المقياس بالنسبة للغرفة أو الجدول أو التقاطع الصغير. دقة GPS تصل إلى متر ، ولكن ما السنتيمتر؟ ملليمتر؟
ثانيًا ، لا يعمل نظام تحديد المواقع العالمي (GPS) بشكل جيد تحت الماء. ليس جيدًا أعني على الإطلاق. وبالمثل ، فإن الأداء متقطع داخل المباني بجدران خرسانية سميكة. أو في الطوابق السفلية. انت وجدت الفكرة. GPS هو نظام قائم على الأقمار الصناعية ، ويعاني من قيود مادية.
لذا تهدف خوارزميات SLAM إلى إعطاء إحساس محسّن بالموضع للأجهزة والآلات الأكثر تقدمًا لدينا.
تحتوي هذه الأجهزة بالفعل على سلسلة من أجهزة الاستشعار والأجهزة الطرفية. تستخدم خوارزميات SLAM البيانات من أكبر عدد ممكن من هذه باستخدام بعض الرياضيات والإحصاءات.
دجاج أم بيض؟ موقف أو خريطة؟
الرياضيات والإحصاءات ضرورية للإجابة على مأزق معقد: هل يستخدم الموقع لإنشاء خريطة المناطق المحيطة أم أن خريطة المناطق المحيطة تستخدم لحساب الموقع؟
الفكر وقت التجربة! أنت مشوه بين الأبعاد إلى مكان غير مألوف. ما هو أول شيء تفعله؟ ذعر؟ حسنا ، اهدأ ، خذ نفسًا. خذ واحدة اخرى. الآن ، ما هو الشيء الثاني الذي تفعله؟ انظر حولك وحاول أن تجد شيئًا مألوفًا. كرسي على يسارك. النبات على يمينك. طاولة قهوة أمامك.
بعد ذلك ، بمجرد الخوف من الشلل "أين أنا بحق الجحيم؟" يلبس ، تبدأ في التحرك. انتظر ، كيف تعمل الحركة في هذا البعد؟ اتخذ خطوة للامام. الكرسي والمصنع يزدادان صغرًا والطاولة تكبر. الآن ، يمكنك تأكيد أنك في الواقع تتحرك إلى الأمام.
الملاحظات هي المفتاح لتحسين دقة تقدير SLAM. في الفيديو أدناه ، عندما ينتقل الروبوت من علامة إلى علامة ، فإنه ينشئ خريطة أفضل للبيئة.
بالعودة إلى البعد الآخر ، كلما تجولت أكثر كلما قمت بتوجيه نفسك. تؤكد الخطوات في جميع الاتجاهات أن الحركة في هذا البعد مشابهة لبعد منزلك. عندما تذهب إلى اليمين ، فإن النبات يلوح أكبر. بشكل مفيد ، ترى أشياء أخرى تحددها كمعالم في هذا العالم الجديد تسمح لك بالتجول بثقة أكبر.
هذه هي في الأساس عملية SLAM.
مدخلات العملية
من أجل إجراء هذه التقديرات ، تستخدم الخوارزميات عدة أجزاء من البيانات التي يمكن تصنيفها على أنها داخلية أو خارجية. بالنسبة لمثال النقل متعدد الأبعاد (اعترف بذلك ، لقد قمت برحلة ممتعة) ، القياسات الداخلية هي حجم الخطوات والاتجاه.
القياسات الخارجية التي تتم على شكل صور. يعد تحديد المعالم مثل النبات والكرسي والطاولة مهمة سهلة للعيون والدماغ. أقوى معالج معروف - الدماغ البشري - قادر على التقاط هذه الصور وليس فقط تحديد الأشياء ، ولكن أيضًا تقدير المسافة إلى ذلك الكائن.
لسوء الحظ (أو لحسن الحظ ، اعتمادًا على خوفك من SkyNet) ، لا تمتلك الروبوتات دماغًا بشريًا كمعالج. تعتمد الآلات على رقائق السيليكون مع رمز مكتوب بشري كدماغ.
تقوم آلات أخرى بإجراء قياسات خارجية. تساعد الأجهزة الطرفية مثل الجيروسكوبات أو غيرها من وحدات قياس القصور الذاتي في القيام بذلك. تستخدم الروبوتات مثل السيارات ذاتية القيادة قياس موضع العجلة كمقياس داخلي.

خارجياً ، تستخدم السيارة ذاتية القيادة والروبوتات الأخرى LIDAR. على غرار كيفية استخدام الرادار للموجات اللاسلكية ، يقيس LIDAR نبضات الضوء المنعكسة لتحديد المسافة. عادة ما يكون الضوء المستخدم فوق البنفسجي أو بالقرب من الأشعة تحت الحمراء ، على غرار مستشعر عمق الأشعة تحت الحمراء.
يرسل LIDAR عشرات الآلاف من النبضات في الثانية لإنشاء خريطة سحابية عالية الدقة ثلاثية الأبعاد. لذا ، نعم ، في المرة التالية التي يتدحرج فيها تيسلا على الطيار الآلي ، سيطلق عليك الليزر. الكثير من الأوقات.
بالإضافة إلى ذلك ، تستخدم خوارزميات SLAM الصور الثابتة وتقنيات رؤية الكمبيوتر كمقياس خارجي. يتم ذلك باستخدام كاميرا واحدة ، ولكن يمكن جعله أكثر دقة باستخدام زوج ستيريو.
داخل الصندوق الأسود
ستقوم القياسات الداخلية بتحديث الموقع المقدر ، والذي يمكن استخدامه لتحديث الخريطة الخارجية. ستقوم القياسات الخارجية بتحديث الخريطة المقدرة ، والتي يمكن استخدامها لتحديث الموقع. يمكنك اعتبارها مشكلة استدلال ، والفكرة هي إيجاد الحل الأمثل.
إحدى الطرق الشائعة للقيام بذلك هي من خلال الاحتمال. تقنيات مثل مرشح الجسيمات التقريبي الموقف ورسم الخرائط باستخدام الاستدلال الإحصائي بايزي.
يستخدم مرشح الجسيمات عددًا محددًا من الجسيمات المنتشرة بواسطة توزيع غوسي. كل جسيم "يتنبأ" بالوضع الحالي للروبوت. يتم تعيين الاحتمال لكل جسيم. تبدأ جميع الجسيمات بنفس الاحتمال.
عندما يتم إجراء القياسات التي تؤكد بعضها البعض (مثل الخطوة إلى الأمام = الجدول يكبر) ، يتم إعطاء الجزيئات "الصحيحة" في موضعها بشكل متزايد احتمالات أفضل. يتم تعيين احتمالات أقل للجزيئات البعيدة.
كلما زاد عدد المعالم التي يمكن للروبوت تحديدها ، كان ذلك أفضل. توفر المعالم ملاحظات للخوارزمية وتسمح بحسابات أكثر دقة.
التطبيقات الحالية باستخدام خوارزميات SLAM
دعنا نحلل هذه القطعة الرائعة من التكنولوجيا بقطعة رائعة من التكنولوجيا.
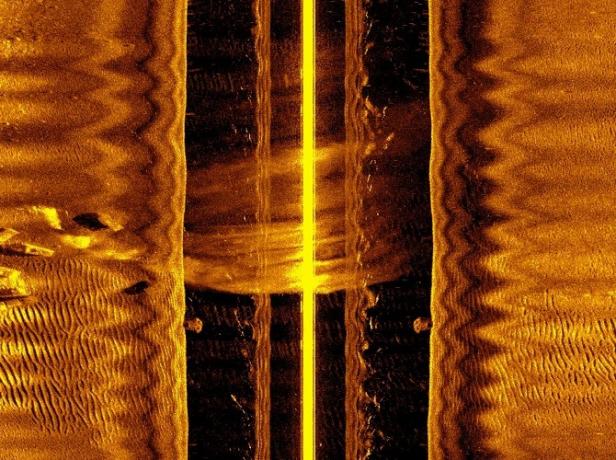
المركبات تحت الماء المستقلة (AUVs)
يمكن للغواصات غير المأهولة العمل بشكل مستقل باستخدام تقنيات SLAM. توفر وحدة IMU الداخلية بيانات التسارع والحركة في ثلاثة اتجاهات. بالإضافة إلى ذلك ، تستخدم مركبات AUV السونار المواجه للأسفل لتقدير العمق. يعمل السونار بالمسح الجانبي على إنشاء صور لقاع البحر ، يبلغ مداه بضع مئات من الأمتار.
الواقع المختلط يلبس
أنتجت Microsoft و Magic Leap نظارات يمكن ارتداؤها تطبيقات الواقع المختلط Windows Mixed Reality: ما هو وكيف تجربه الآنWindows Mixed Reality هي ميزة جديدة تتيح لك استخدام Windows 10 في الواقع الافتراضي والمعزز. إليك سبب كونها مثيرة وكيفية معرفة ما إذا كان جهاز الكمبيوتر الخاص بك يدعمها. اقرأ أكثر . يعد تقدير الموقع وإنشاء خريطة أمرًا بالغ الأهمية بالنسبة لهذه الأجهزة القابلة للارتداء. تستخدم الأجهزة الخريطة لوضع كائنات افتراضية فوق كائنات حقيقية وجعلها تتفاعل مع بعضها البعض.
نظرًا لأن هذه الأجهزة القابلة للارتداء صغيرة ، فلا يمكنها استخدام الأجهزة الطرفية الكبيرة مثل LIDAR أو السونار. بدلاً من ذلك ، يتم استخدام مستشعرات عمق الأشعة تحت الحمراء الأصغر والكاميرات المواجهة للخارج لرسم خريطة للبيئة.
سيارات ذاتية القيادة
تتمتع السيارات المستقلة بميزة صغيرة على الأجهزة القابلة للارتداء. مع حجم مادي أكبر بكثير ، يمكن للسيارات حمل أجهزة كمبيوتر أكبر ولديها المزيد من الأجهزة الطرفية لإجراء قياسات داخلية وخارجية. من نواح عديدة ، تمثل السيارات ذاتية القيادة مستقبل التكنولوجيا ، سواء من حيث البرمجيات أو الأجهزة.
تكنولوجيا SLAM تتحسن
مع استخدام تقنية SLAM بعدد من الطرق المختلفة ، فإنها مسألة وقت فقط قبل أن يتم إتقانها. بمجرد رؤية السيارات ذاتية القيادة (والمركبات الأخرى) على أساس يومي ، ستعرف أن التوطين المتزامن ورسم الخرائط جاهزان للاستخدام من قبل الجميع.
تتحسن تقنية القيادة الذاتية كل يوم. اريد معرفة المزيد؟ تحقق من تفصيل MakeUseOf التفصيلي لـ كيف تعمل السيارات ذاتية القيادة كيف تعمل السيارات ذاتية القيادة: الصواميل والمسامير خلف برنامج Google المستقل للسيارةالقدرة على التنقل ذهابًا وإيابًا للعمل أثناء النوم أو تناول الطعام أو اللحاق بما تفضله المدونات مفهوم جذاب بنفس القدر ويبدو بعيدًا ومستقبليًا جدًا يحدث. اقرأ أكثر . قد تكون مهتم ايضا ب كيف يستهدف القراصنة السيارات المتصلة.
حقوق الصورة: chesky_w /صور الإيداع
توم مهندس برمجيات من فلوريدا (يصرخ لرجل فلوريدا) مع شغفه بالكتابة ، كرة القدم الجامعية (اذهب إلى Gators!) ، CrossFit ، وأكسفورد.